

SSL 证书
数字证书
安全运维
域名
企业服务
SSL 证书
数字证书
安全运维
域名
企业服务
博客 > linux入门:linux驱动、ARM学习环境搭建
浏览量:1618次评论:0次
作者:锐成网络整理时间:2024-05-11 11:23:08
在当今信息技术快速发展的时代,嵌入式系统已成为各行各业的关键技术之一。而在嵌入式系统中,Linux驱动是不可或缺的一部分。本文将详细介绍linux驱动、ARM学习环境搭建。
环境说明
通常安装1个可以交叉编译驱动程序、ARM汇编代码的linux环境,需要安装以下3个软件:
1. 安装vmware
下载地址 https://www.vmware.com/go/getworkstation-win
安装步骤
(1)双击VMware-workstation-full.exe,然后下一步
(2)勾选我接受许可协议,下一步
(3)更改软件的安装位置,下一步 或者不更改位置直接下一步
(4)如不想自动检查更新软件的话,不勾选直接下一步
(5)两个勾打上在桌面和菜单栏创建软件图标,下一步
(6)下一步之后选择安装
(7)完成安装
(8)然后双击启动VMware输入密钥
点击我希望试用即可。
2. 安装ubuntu
下载地址:
http://mirrors.aliyun.com/ubuntu-releases/20.04.2/ubuntu-20.04.2.0-desktop-amd64.iso
点击创建新的虚拟机
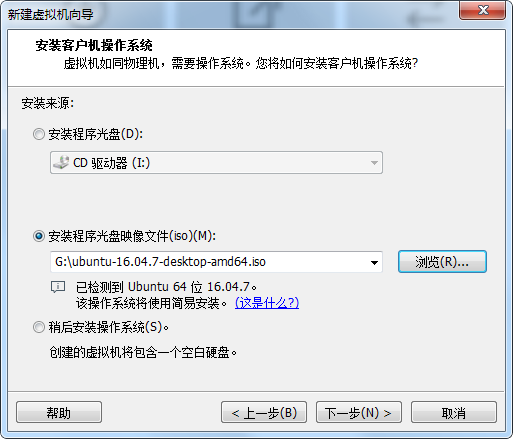
选择典型,点击下一步,选中下载的iso文件。
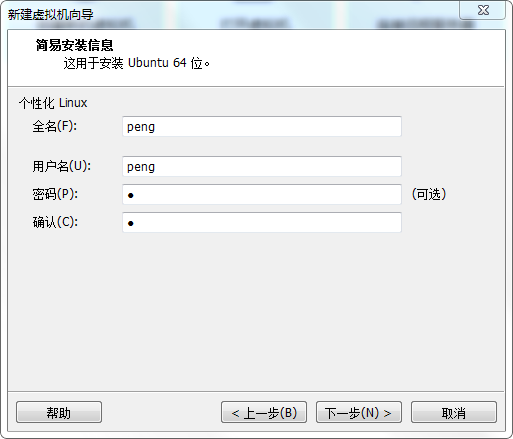
填写用户名密码,为方便起见,密码设置为1
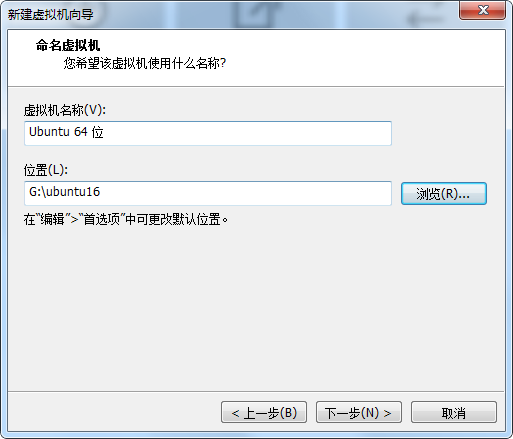
给虚拟机起一个名字:
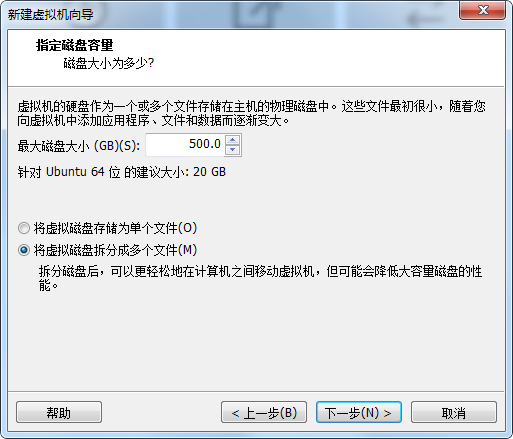
磁盘空间可以设置大一点,彭老师设置的是500G
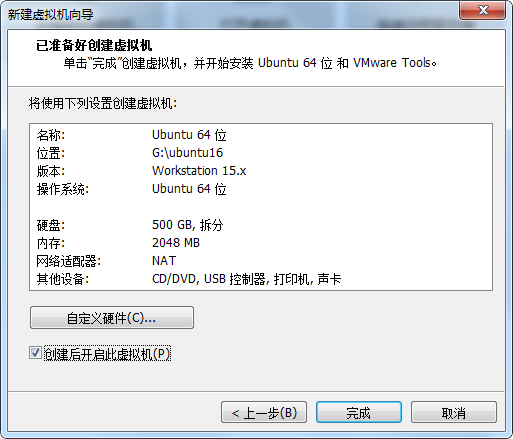
点击完成
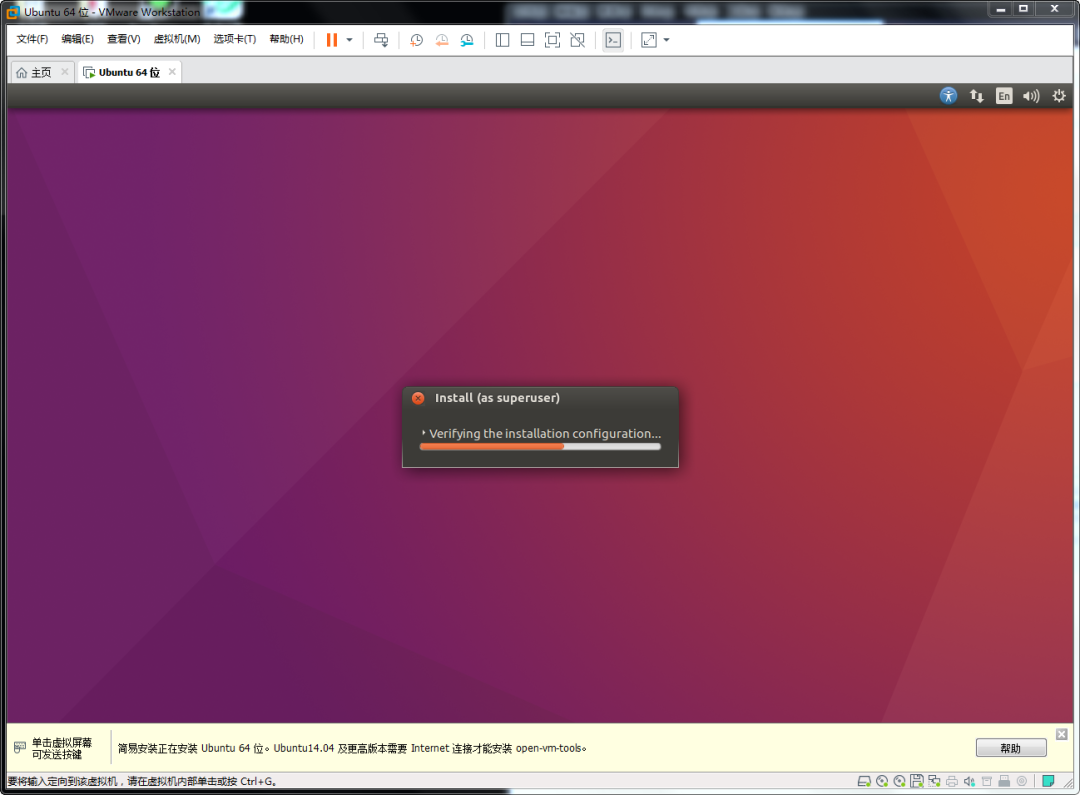
点击完成开始安装,最好断开网络安装,速度会快一些
输入密码1,即可登录
3. 安装必备工具
为了方便拷贝文件到ubuntu中,还需要安装vm-tools,
执行以下操作:
1. 鼠标点进ubuntu任意位置,然后按下组合键:ctrl+alt + t,即可打开命令终端。
执行以下命令
peng@ubuntu:~$sudo apt-get autoremove open-vm-tools
peng@ubuntu:~$sudo apt-get install open-vm-tools-desktop
会提示输入密码,输入之前安装的设置的密码即可。
完成之后,就可以直接从windows拷贝文件到ubuntu中,非常方便。
4. 安装交叉编译工具
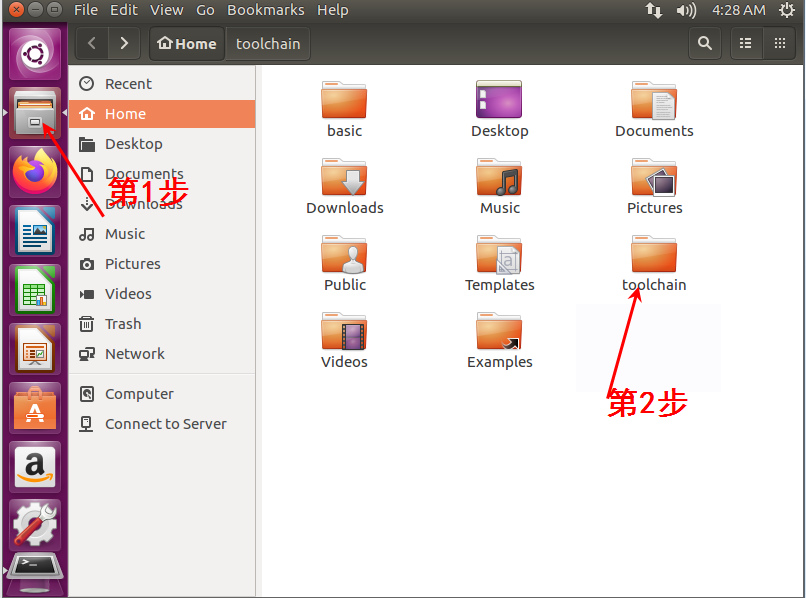
执行以下操作:创建目录toolchain,并修改权限
1. root@ubuntu:/home/peng# mkdir toolchain
2. root@ubuntu:/home/peng# chmod 777 toolchain
将gcc-4.6.4.tar.xz拷贝到toolchain目录下。
解压该压缩包:
root@ubuntu:/home/peng# cd toolchain/
root@ubuntu:/home/peng/toolchain# tar xvf gcc-4.6.4.tar.xz
修改文件/etc/bash.bashrc添加如下内容
export PATH=$PATH:/home/peng/toolchain/gcc-4.6.4/bin
重启配置文件:
root@ubuntu:/home/peng/toolchain#source /etc/bash.bashrc
安装库第三方库:
root@ubuntu:/home/peng/toolchain# apt-get install lsb-core
工具链的测试:
root@ubuntu:/home/peng/toolchain# arm-none-linux-gnueabi-gcc –v
得到以下结果,说明安装成功:
root@ubuntu:/home/peng/toolchain# arm-none-linux-gnueabi-gcc -v
Using built-in specs.
COLLECT_GCC=arm-none-linux-gnueabi-gcc
COLLECT_LTO_WRAPPER=/home/peng/toolchain/gcc-4.6.4/bin/../libexec/gcc/arm-arm1176jzfssf-linux-gnueabi/4.6.4/lto-wrapper
Target: arm-arm1176jzfssf-linux-gnueabi
Configured with: /work/builddir/src/gcc-4.6.4/configure --build=i686-build_pc-linux-gnu --host=i686-build_pc-linux-gnu --target=arm-arm1176jzfssf-linux-gnueabi --prefix=/opt/TuxamitoSoftToolchains/arm-arm1176jzfssf-linux-gnueabi/gcc-4.6.4 --with-sysroot=/opt/TuxamitoSoftToolchains/arm-arm1176jzfssf-linux-gnueabi/gcc-4.6.4/arm-arm1176jzfssf-linux-gnueabi/sysroot --enable-languages=c,c++ --with-arch=armv6zk --with-cpu=arm1176jzf-s --with-tune=arm1176jzf-s --with-fpu=vfp --with-float=softfp --with-pkgversion='crosstool-NG hg+default-2685dfa9de14 - tc0002' --disable-sjlj-exceptions --enable-__cxa_atexit --disable-libmudflap --disable-libgomp --disable-libssp --disable-libquadmath --disable-libquadmath-support --with-gmp=/work/builddir/arm-arm1176jzfssf-linux-gnueabi/buildtools --with-mpfr=/work/builddir/arm-arm1176jzfssf-linux-gnueabi/buildtools --with-mpc=/work/builddir/arm-arm1176jzfssf-linux-gnueabi/buildtools --with-ppl=/work/builddir/arm-arm1176jzfssf-linux-gnueabi/buildtools --with-cloog=/work/builddir/arm-arm1176jzfssf-linux-gnueabi/buildtools --with-libelf=/work/builddir/arm-arm1176jzfssf-linux-gnueabi/buildtools --with-host-libstdcxx='-static-libgcc -Wl,-Bstatic,-lstdc++,-Bdynamic -lm' --enable-threads=posix --enable-target-optspace --without-long-double-128 --disable-nls --disable-multilib --with-local-prefix=/opt/TuxamitoSoftToolchains/arm-arm1176jzfssf-linux-gnueabi/gcc-4.6.4/arm-arm1176jzfssf-linux-gnueabi/sysroot --enable-c99 --enable-long-long
Thread model: posix
gcc version 4.6.4 (crosstool-NG hg+default-2685dfa9de14 - tc0002)
有了这个环境,学习Linux驱动环境就搭建好了。
重要声明:本文来自一口Linux,经授权转载,版权归原作者所有,不代表锐成观点,转载的目的在于传递更多知识和信息。
相关文章推荐
2024-08-20 17:58:16
2024-08-19 17:49:29
2024-08-19 10:23:28
2024-08-16 17:06:33
2024-08-15 17:22:55
热门工具
标签选择
阅读排行
官方咨询热线:400-002-9968
官方邮箱:business@racent.com
地址:上海市普陀区真南路1199弄智创Top8号楼602A单元

商务合作:business@racent.com
投诉意见:media@racent.com
代理域名注册服务机构:成都西维数码科技有限公司 北京新网数码信息技术有限公司 阿里云计算有限公司










我的评论
还未登录?点击登录